
Graduate Researcher:
Edwin Williams
Faculty Adviser:
Prof. Yan Jin
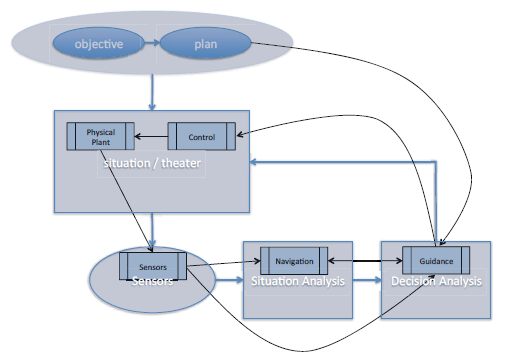
Guidance, Navigation, and Control (GN&C) systems take data from the environment to create a mathematical representation of the system state. The system’s guidance solution is then determined from this navigation solution and is typically a minimization of some objective weight function, J. This objective function is a time, cost, weight, or other physically realizable quantity. In this paper we show a method to create a guidance solution based upon system risk for a system’s goal. The methodology presented uses a goal to create a situation. The situation assessment creates a situation model whose risk can be determined. The projection of this into the future then creates a trajectory for the system to follow. A simulation of using nautical vessels is shown and compared to traditional optimization methods.
Related Publications:
Williams, E., Jin, Yan “Dynamic Probability Fields for Risk Assessment and Guidance Solutions” in Annual of Navigation, 2019, DOI: 10.1515/aon-2019-0004 [PDF]
Williams, E., Jin, Y., Low Earth Orbit Debris Avoidance Using Situation-Risk Assessment Modeling , in Proceedings of AIAA/SPACE Forum 2018, September 17-19, 2018, at the Hyatt Regency Orlando, Orlando, Florida [PDF]
Williams, E., Jin, Y., Use of Situation and Risk Modeling in Guidance Solutions, in Proceedings of IEEE/ION PLANS 2018 Conference, April 23-26, 2018, at the Hyatt Regency Monterey, Monterey, California [PDF]